Success Story

CANISA Card Embedded in Flight Simulator's Control Loading System
WITTENSTEIN aerospace & simulation, of Bartlett, Illinois, is a world leader in the design, development and production of control loader technology for the aerospace and simulation markets. The company uses Controller Area Network (CAN) technology, which is efficient and robust.
The key to the control loading system's functionality is a network interface module (NIM). When the former ISA CAN card in the system became obsolete, WITTENSTEIN's engineers selected Contemporary Controls CANISA-DN as a replacement.
The CANISA-DN module from Contemporary Controls provided a simple method to set-up and install a card which could communicate with a number of our control electronics," said Senior Systems Engineer Scott Metcalfe. "The CAN card was used to communicate on the CAN bus to the actuators with messages that control the torque and speed of these devices in order to vary the force-feel characteristics. These actuators are modular in form, so the individual can select the servo, gear ratio, and the system control module configuration to suit the application.
Metcalfe said the decision to use the CANISA-DN was made easier because the card is COTS which required no design effort, and is ISA which meant it could be assembled into an industrial PC.
Contemporary Controls' CANISA-DN supports 8-bit transfers and benefits from the additional interrupts on the expanded AT bus. It incorporates the Philips SJA1000 CAN stand-alone controller chip. The CANISA is backward compatible with its predecessor, the 82C200, but has more advanced features. The SJA1000 operates in either BasicCAN (11-bit identifiers) or the new mode called PeliCAN which supports the CAN 2.0B specification (29-bit identifiers). It is equipped with a 16 MHz clock frequency, larger receive buffer and better acceptance-filtering-including the ability to extend the acceptance mask to the data field.
This product measures 4.20" x 6.50" (106 mm x 165 mm) with data rates up to 1 Mbps. Power requirements for ISA bus are: +5 V, 80 mA and for CANbus are: +24 V, 80 mA.
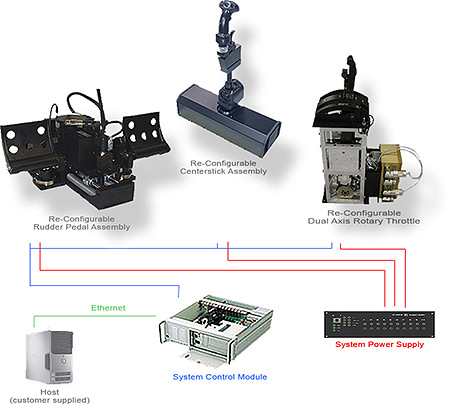
Metcalfe said that one or two CAN cards are located in a System Control Module (SCM) which runs the proprietary software, the Aktiv8® Software. This software controls the actuators over the CAN bus to provide the appropriate force-feel for the aircraft controls in the simulation. It is stored on a compact flash card which acts as the hard drive for the SCM. The SCM is connected to a host which runs the simulation and provides inputs to the control loading system and receives position and force data over an Ethernet TCP/IP connection. Cables are built to specification which connect all the actuators on one bus to the SCM.
We can construct CAN cables from standard 24AWG cable and 9-pin D-sub connectors, said Metcalfe. The lengths change dependent on the number of nodes and to where they are located in the simulator.
 WITTENSTEIN aerospace & simulation's drop-in assembly control loading systems |
For this application, WITTENSTEIN engineers did not write their own driver for the CANISA nor did they use an off-the-shelf type such as Linux open-source CAN driver. Metcalfe said his team selected one from Contemporary Controls. Contemporary Controls' drivers support Windows® 98/ME/2000/XP, Linux and DOS.
Operating systems are a matter of choice. Therefore, WITTENSTEIN used the Real Time OS called RTOS32 from OnTime GmbH. On Time's royalty-free hard real-time embedded operating system for 32/64-bit x86 CPUs implements a Windows subset kernel in only 16k of memory. It provides about 290 Win32 API functions and can load Windows DLLs. It also fully integrates with MicroSoft® Visual Studio and other Compilers.
The high performance and programmability of the control loading systems make them equally suitable for the complete range of applications, from PC-based trainers to level-D simulators.